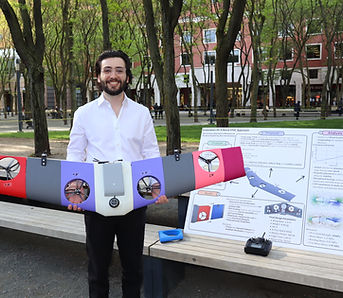
Invented a modular, long-range VTOL drone platform capable of vertical takeoff/landing, and hovering. Unlike conventional approaches, the design tests the feasibility and efficiency of integrating the vertical lift propellers inside the wing structure.